This research was presented at CAADRIA 2020 in the paper, ‘Modeling UAM Scenarios for Urban Design,’ co-authored by Jeffrey Huang. Please take a look at the paper here on CUMINCAD or on ResearchGate.

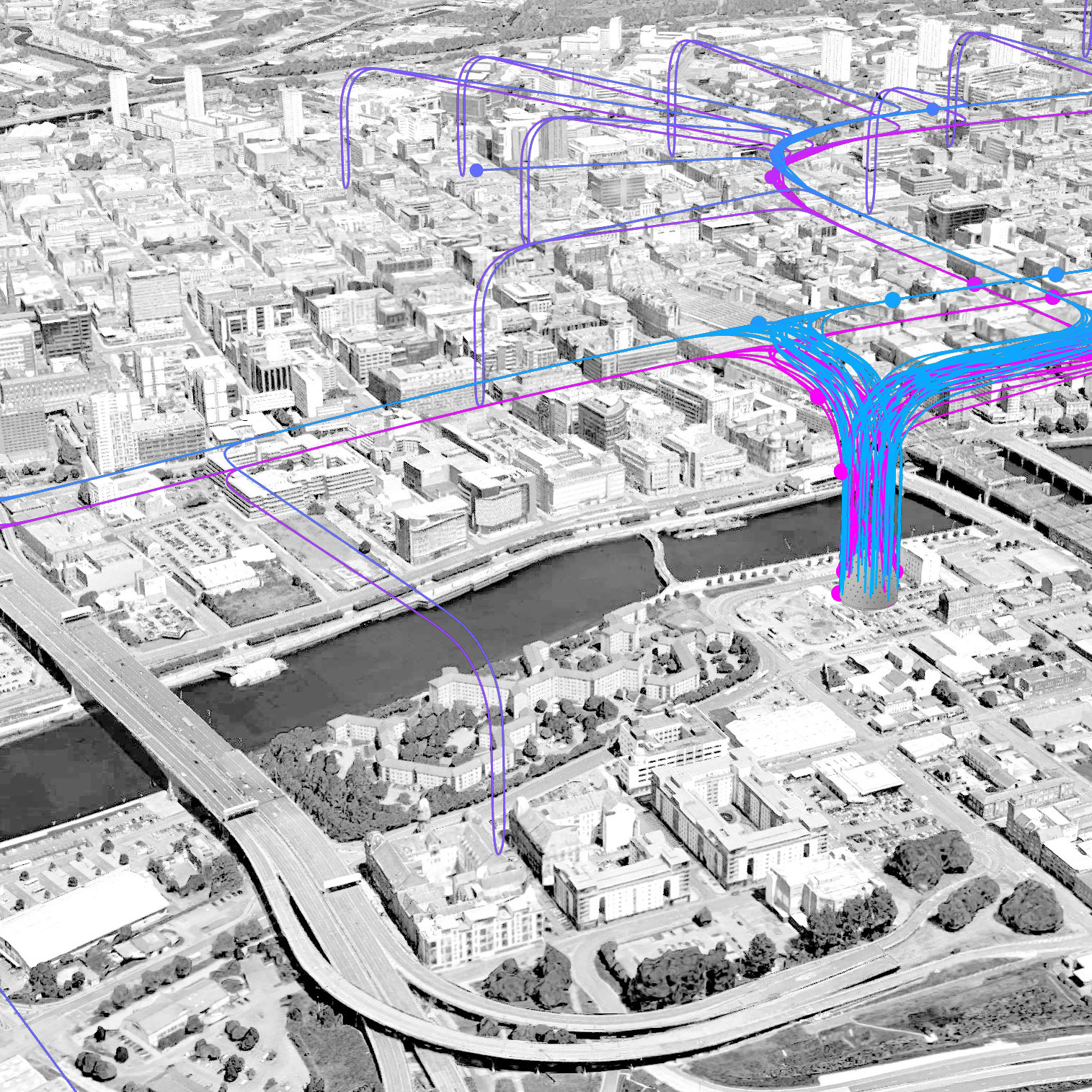
The motivation behind this research was to support urban design scenarios that could explore with fast quantitative feedback how a city with a sky full of drones and air-taxis might function and feel. As an example of this kind of urban design scenario, I am sharing an image by students Jean-Baptiste Clochet and Nicola Mahon, who worked with an early version of the UAMsim tool.
Existing urban noise simulation software does not yet have functionality to approximate new aerial vehicles like drones. Prominent urban noise simulators are also difficult to integrate with design process and are often prohibitively expensive or complex for use in early design phases (when they could potentially make the greatest impact.)
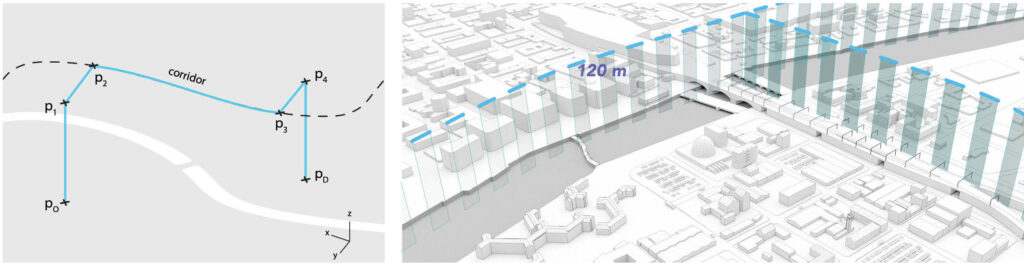
The digital tool we created has two parts: one that generates flight paths for sets of origin/destination pairs, and a second part that generates a strategic approximation of noise levels for the flight paths.
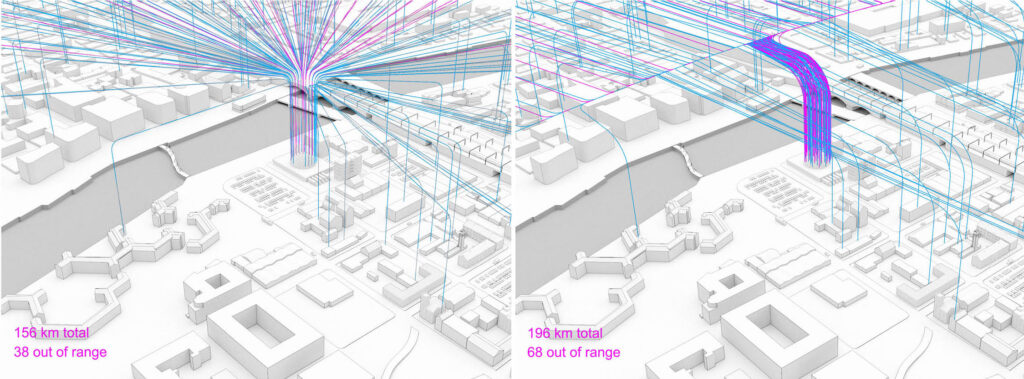
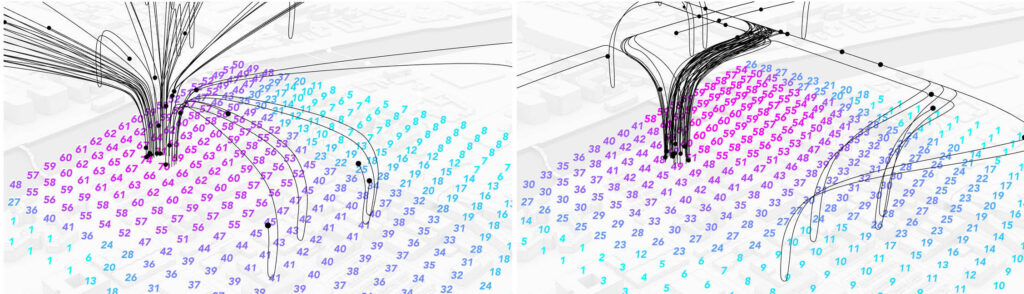
We introduced a function to allow the user to designate one or several flight corridors, that would bundle flight paths over a specific area. Below is an image of flights paths before and after adding a corridor over the river.

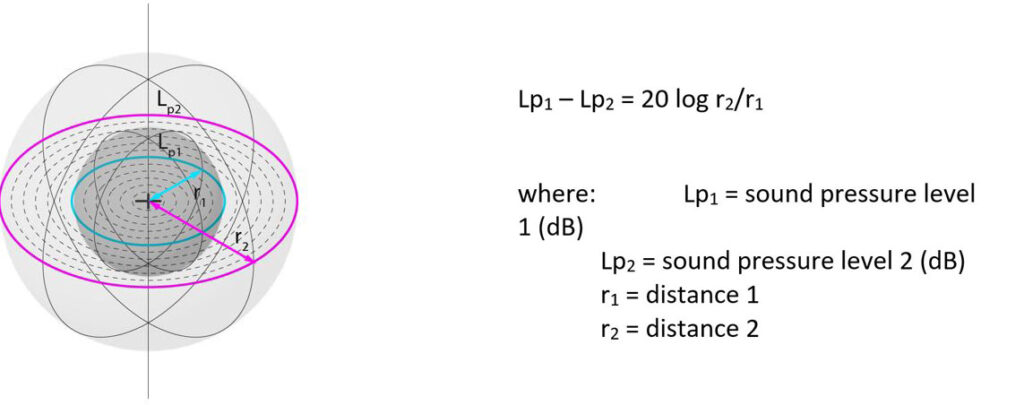
To approximate noise levels generated by the drones we calculated noise pressure levels at sample points on the ground, based on some simple rules for the diminution of sound over distance.
With this technique we were able to get some initial visual feedback on the distribution of noise, of the sort which would be helpful to an urban designer not only in creating a masterplan, but also in providing feedback to aviation authorities about where flight paths should or should not be located.

The research project suggested to us a future where urban designers and planners may be in more direct contact with aviation authorities — collaborating to plan airspace intelligently in order to avoid nuisance or danger to neighborhoods on the ground.
 Here is the abstract from the paper:
Here is the abstract from the paper:
Recent developments in unmanned aerial vehicles (UAVs), including drone delivery services and air taxis, are revolutionizing urban transport, leading to a new field of research referred to as Urban Air Mobility (UAM). While several contemporary efforts to computationally model future scenarios for UAM exist, in this paper we argue that these models tend to be narrowly conceived as air-space design and management tools and provide little information on ground-level impacts. This paper describes an ongoing effort to create UAM modelling tools useful specifically to urban designers as part of a push toward integration of urban airspace design with ground-level master-planning. Current functions permit designers to visualize drone-fleet origin-corridor-destination routes, generate a strategic model of UAM noise, and compare tradeoffs between UAM system efficiency and noise.
Below you can find an early demo animation that presented the goals and outcomes of the research in UAM simulation for urban design.
Below is the presentation video shared at CAADRIA 2020.